Control Inteligente
Profesor: Jorge Casillas
La disposición del material docente y la gestión de entrega de trabajos se realiza a través de PRADO
En el siguiente enlace puedes consultar la guía docente
Para acceder a vídeos de la asignatura, puedes consultar esta sección
Teoría
Martes, 11:30-13:30, aula 110 de la ETSI Caminos, Canales y Puertos- Tema 1: Introducción al Control Inteligente (2h)
- Robótica autónoma móvil
- Sistemas inteligentes para control
- Control difuso
- Ejemplos y aplicaciones
- Tema 2: Introducción a la Lógica Difusa (3h) Video
- Teoría de conjuntos difusos: propiedades, operaciones y relaciones
- Razonamiento aproximado: variables lingüísticas, reglas difusas, regla composicional de inferencia
- Tema 3: Control Difuso (7h) Video 1 Video 2
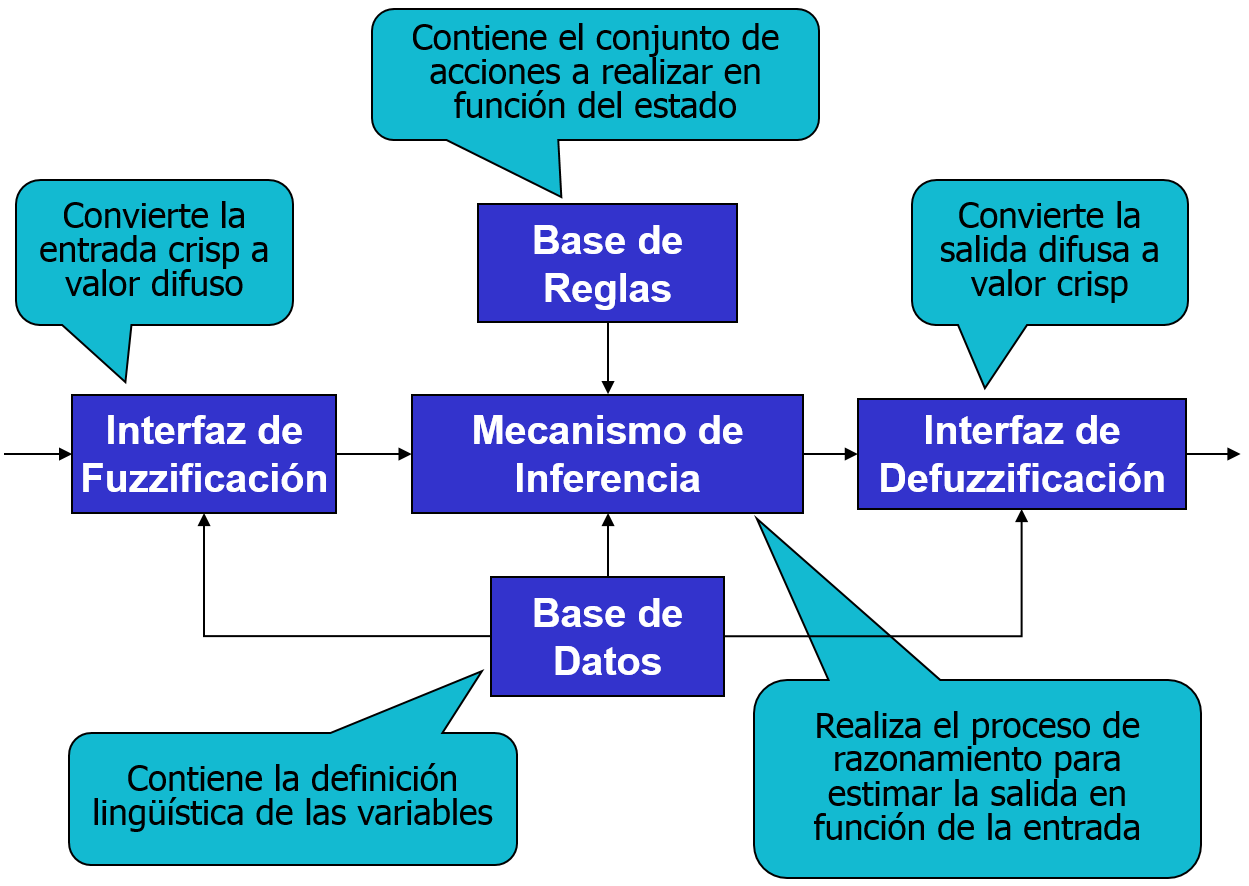
- Estructura del controlador y representación del conocimiento
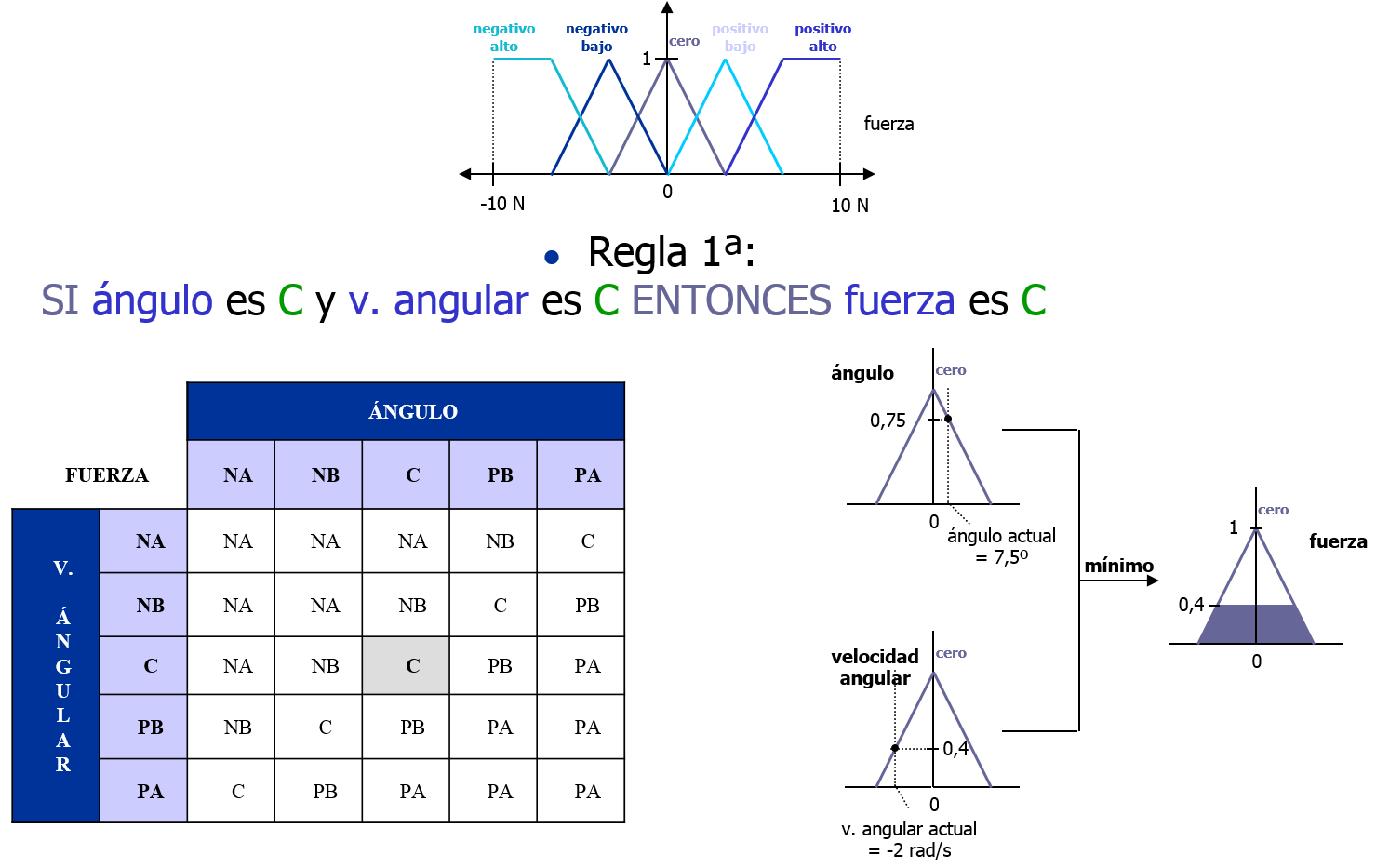
- Mecanismos de inferencia
- Análisis (estabilidad, precisión e interpretabilidad)
- Tema 4: Aprendizaje Automático de Controladores Difusos (6h) Video 1 Video 2 Video 3
- Introducción al aprendizaje automático
- Algoritmos ad hoc
- Sistemas difusos genéticos
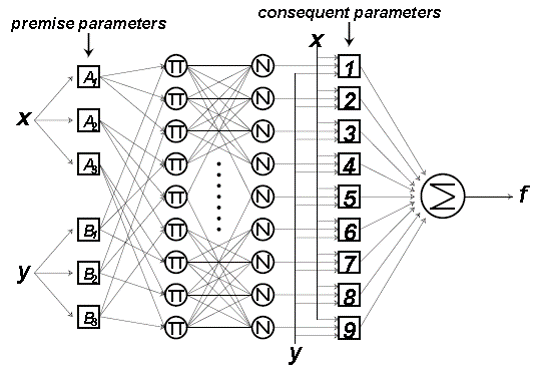
- Sistemas neuro-difusos
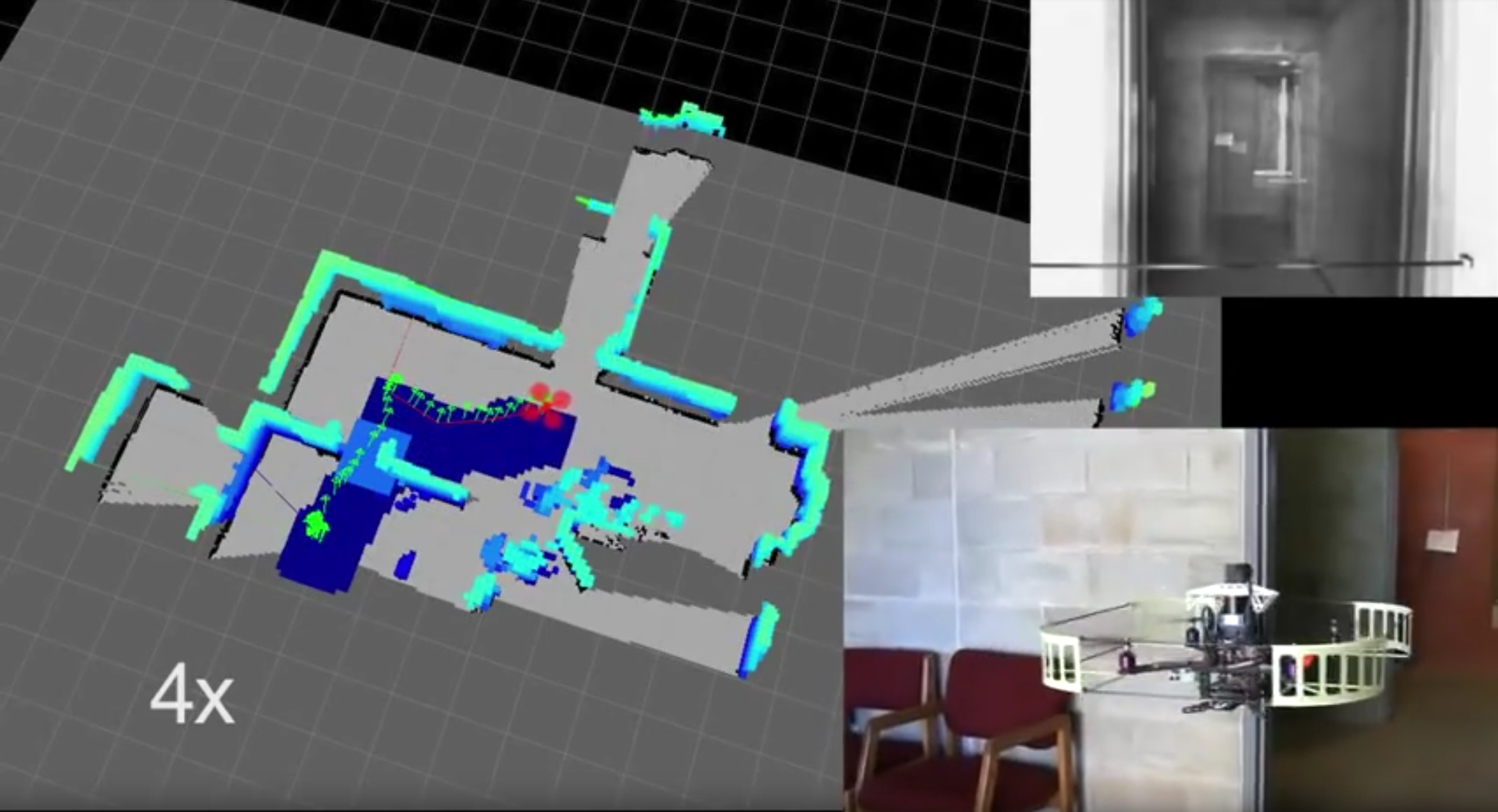
- Tema 5: Localización y Mapeado en Robótica Autónoma (6h) Video
- Representación de creencia y del mapa
- Localización mediante mapa probabilístico y otros sistemas. Filtro de Kalman
- Construcción autónoma del mapa (SLAM, simultaneous localization and mapping)
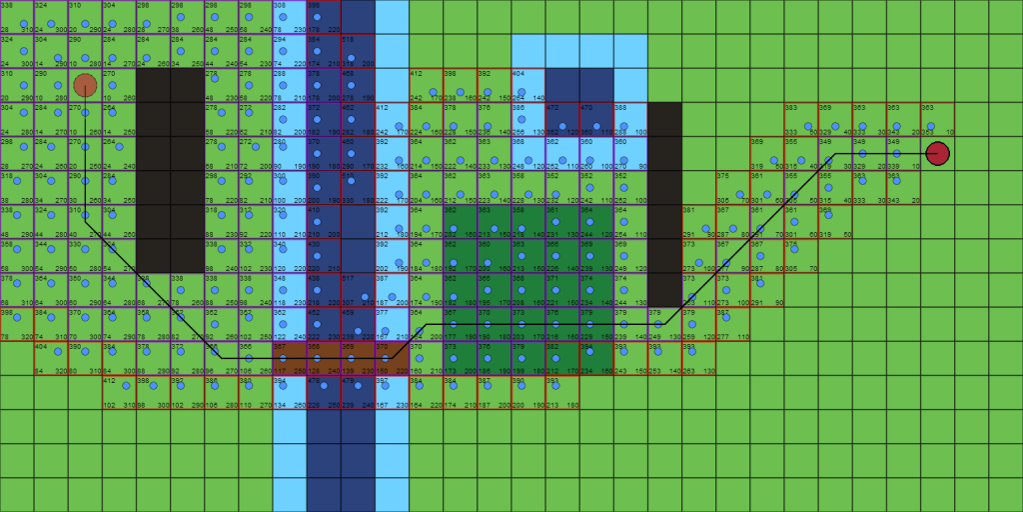
- Tema 6: Planificación en Robótica Autónoma (4h) Video 1 Video 2
- Planificación de trayectorias (Dijkstra, A*)
- Planificación de tareas (MDP, POMDP)
Prácticas
Viernes, 12:30-14:30, laboratorio A1 (planta -1) de la ETSI Caminos, Canales y Puertos- Seminarios/Talleres
- Herramientas para diseño de controladores difusos (Xfuzzy y FLT de Matlab)
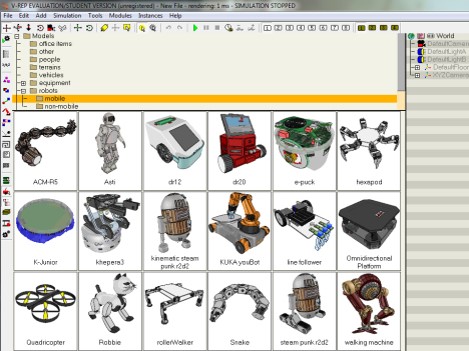
- V-REP para simulación de robots
- Aprendizaje automático de controladores difusos
- Ejemplos de problemas reales sobre robótica autónoma móvil
- Prácticas de Laboratorio
- P1: Aplicación teórica de control difuso (Xfuzzy y Matlab)
- P2: Control difuso de un robot móvil (Xfuzzy y V-REP)
- P3: Localización y mapeado en robótica móvil (Matlab)

Microproyectos
Durante el desarrollo de la asignatura, se ofrece al alumnado la posibilidad de realizar microproyectos relacionados con control y robótica para mejorar su nota. En estos años de la asignatura se han realizado diferentes microproyectos desde cómo construir un controlador del péndulo invertido con una vieja impresora, o desarrollar un simulador de un controlador difuso para levitación magnética o controlar un robot móvil Pioneer 3-DX, hasta estudiar cómo los robots interpretan instrumentos musicales o cómo los algoritmos genéticos pueden componer música.
Curso 2017-2018
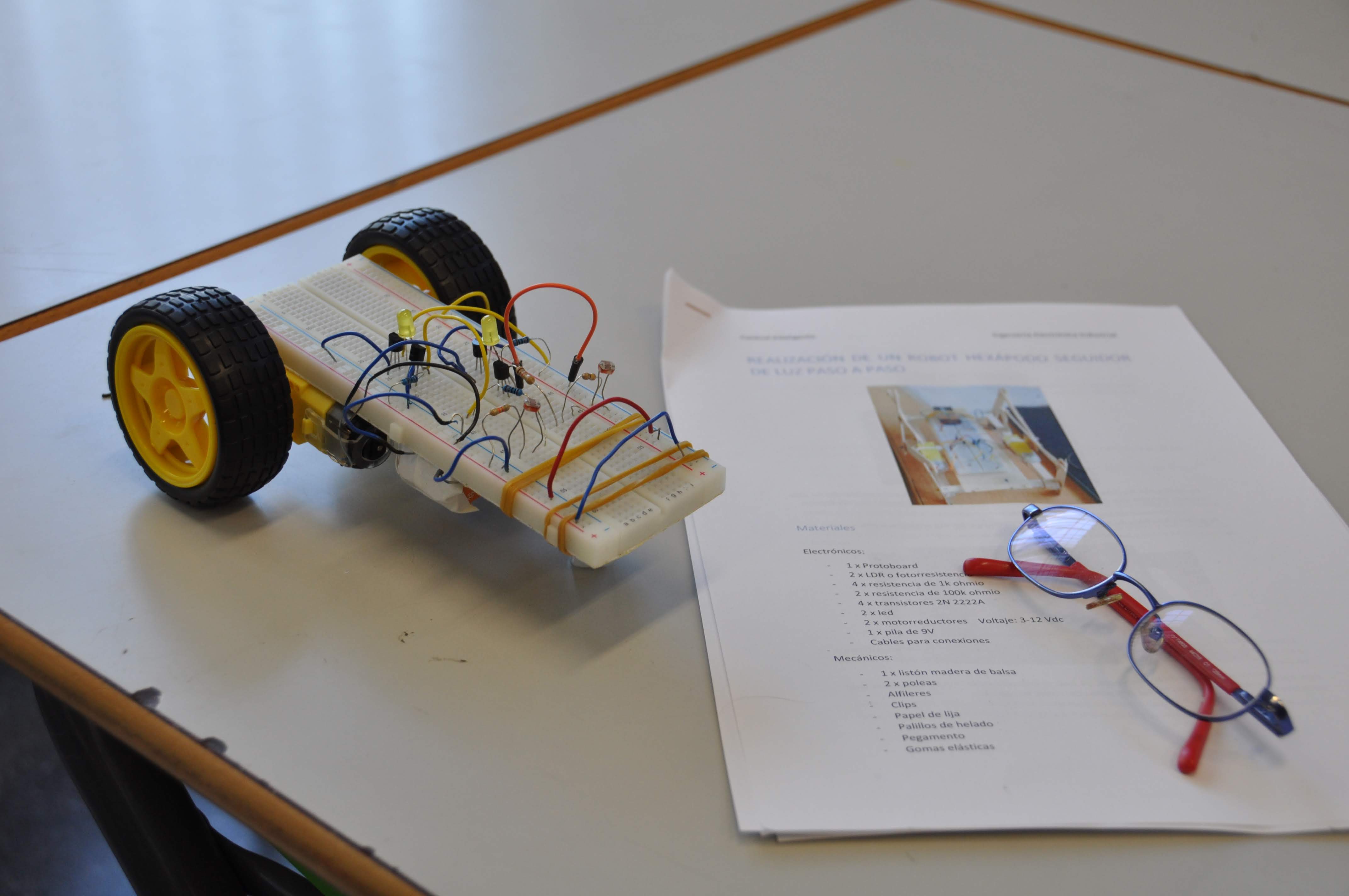
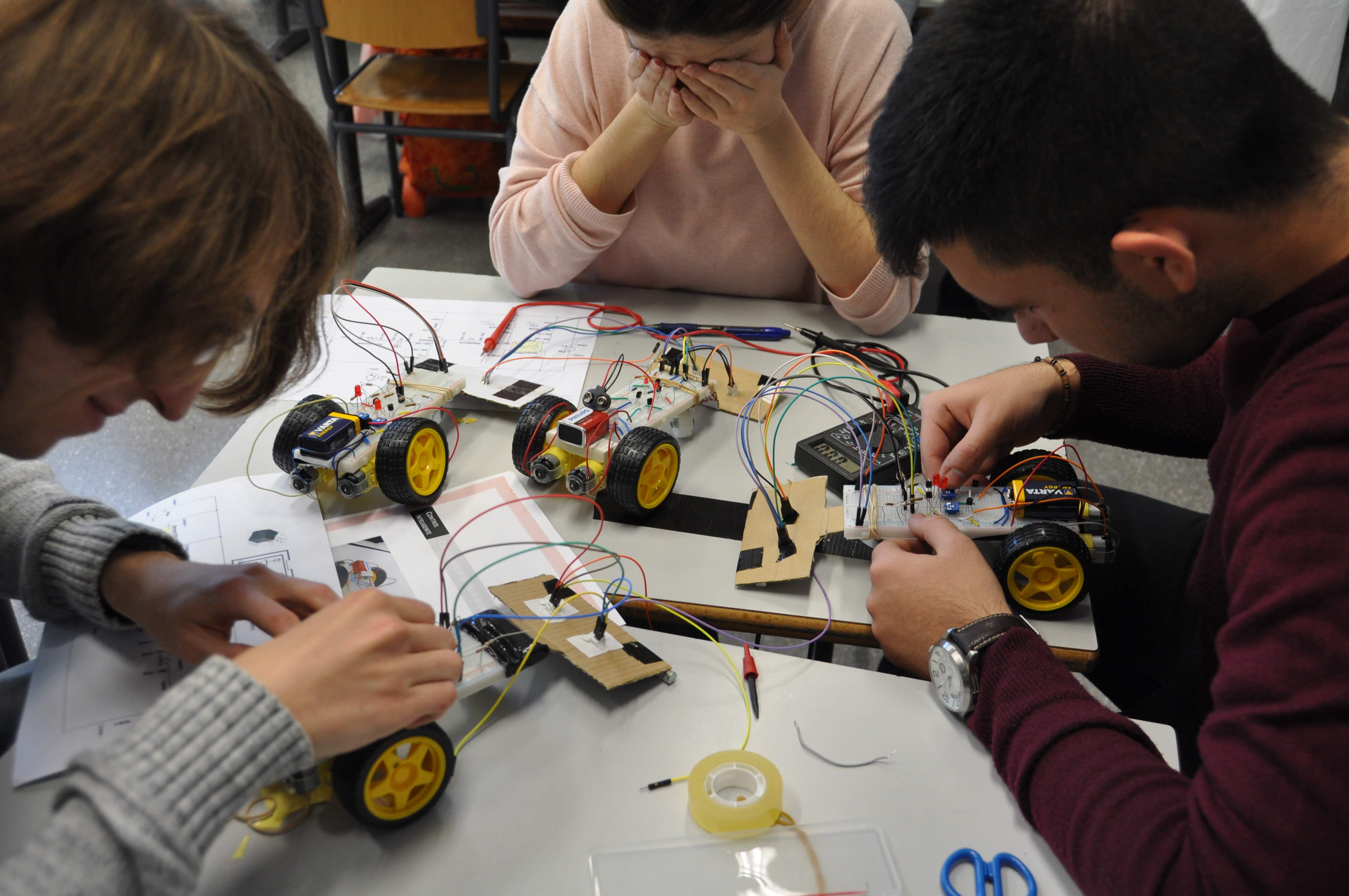
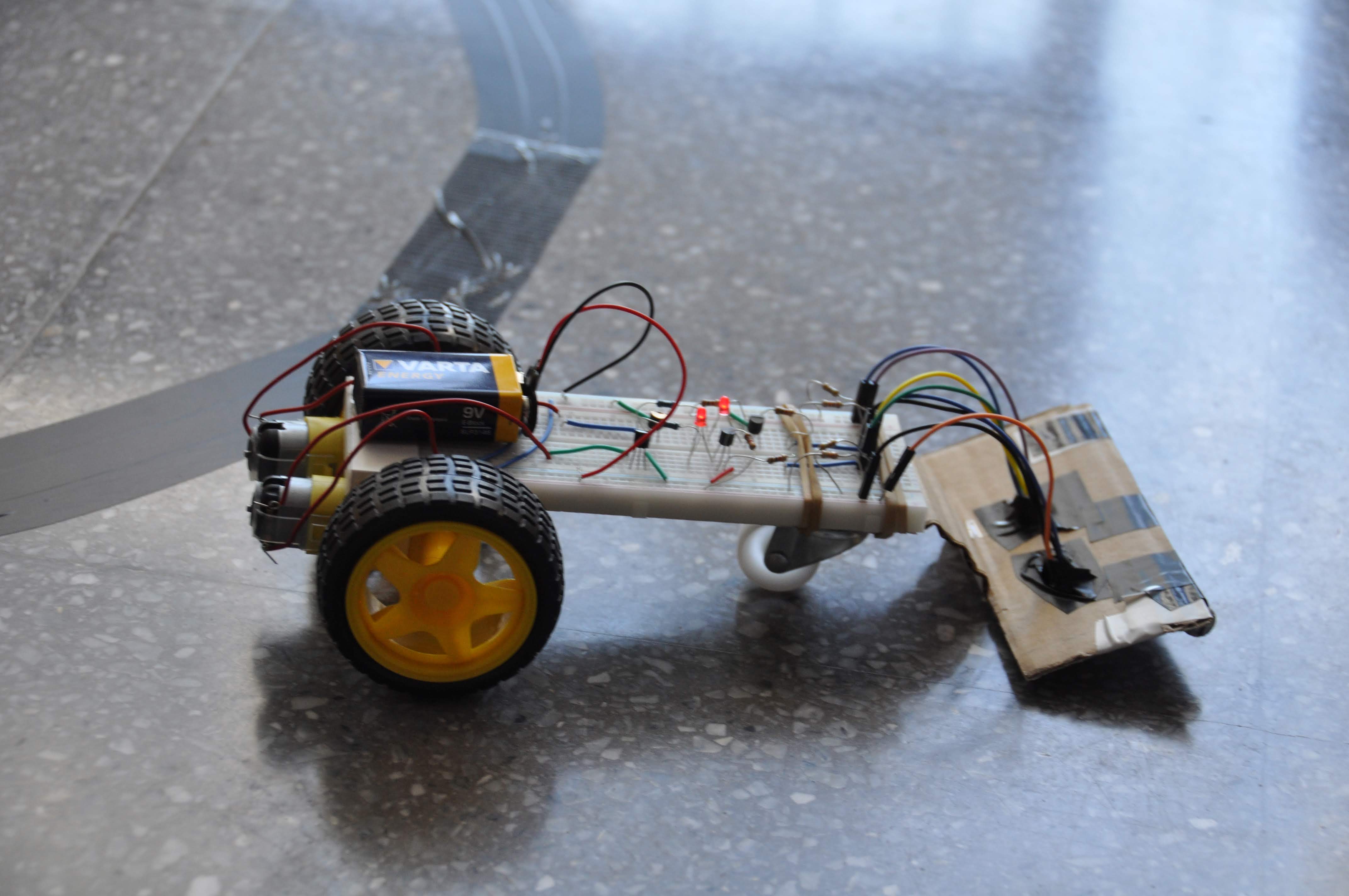
En enero de 2018, parte del alumnado participó en un taller donde enseñaron a estudiantes de 5º de primaria (10 años de edad) los conceptos básicos de electrónica analógica y cómo construir robots con ella. A continuación se presenta la descripción del taller realizada por el tutor de primaria, las presentaciones realizadas y algunas fotos y vídeos del evento. Fue un día fantástico donde adultos y pequeños disfrutaron por igual de la pasión por la robótica. Muchas gracias a Joaquín, Carmen, Álvaro, Gerardo y Juan Antonio, alumnos de Control Inteligente, por participar en este microproyecto.
Ir al artículo en el blog del colegio
Hoy hemos podido disfrutar de un extraordinario taller de electrónica y robótica, propuesto por Jorge, profesor de la UGR, del departamento de Ciencias de la Computación e Inteligencia Artificial y un estupendo grupo de cinco alumnos: Joaquín, Carmen, Álvaro, Gerardo y Juan Antonio del Grado en Ingeniería Electrónica Industrial de la UGR.
(tutor 5º EPO)







Curso 2018-2019
Tras la experiencia tan positiva del año anterior, en 2019 repetimos con un taller de robótica y electrónica en un colegio de primaria. La propuesta fue completísima con seis proyectos diferentes (semáforo con mecánica y con microprocesador, piano con electrónica, robot que sigue órdenes de voz, clasificador de bolas de colores que luego forma dibujos matriciales, mano robot que juega al piedra-papel-tijera y un robot que evita obstáculos y dibuja en el suelo). Todo gracias a la participación de un nutrido equipo de estudiantes de Control Inteligente: Marina, Juan, Luis, Miguel, Rosa, Juan Carlos, Pablo, Manolo, Víctor, Álvaro, José Antonio y Carlos. Aquí presentamos un vídeo que resume el trabajo realizado en este taller.
Trabajos Fin de Grado (TFG)

- Interpretación inteligente de señales de tráfico en un vehículo autónomo
- Nuevos comportamientos inteligentes en un vehículo autónomo
- Control de movimiento autónomo de esquive del cobot UR10
- Control inteligente de un vehículo autónomo
- Vuelo autónomo de drones de bajo coste mediante móviles
- Robot aspirador autónomo mediante visual SLAM
- Diseño e implementación de robótica de enjambre con inteligencia colectiva
- Localización y mapeado de un robot móvil autónomo
- Dispositivos y herramientas para análisis inteligente del consumo energético en el hogar
- Desarrollo de herramientas didácticas para implementación de comportamientos inteligentes en un vehículo de radiocontrol
- Comportamientos inteligentes para conducción autónoma mediante sensores LiDAR
Para ello, se dispone del siguiente material: automóvil radiocontrolado a escala 1:16 con chasis HSP 94186, plataforma de fuente abierta Donkeycar que incluye Keras sobre TensorFlow, ordenador de placa simple Raspberry Pi 3 B, cámara 1080p, controlador de señal PWM SunFounder PCA9685 y batería portátil. En los siguientes vídeos se pueden ver el resultado de tres TFG sobre este coche de radiocontrol.
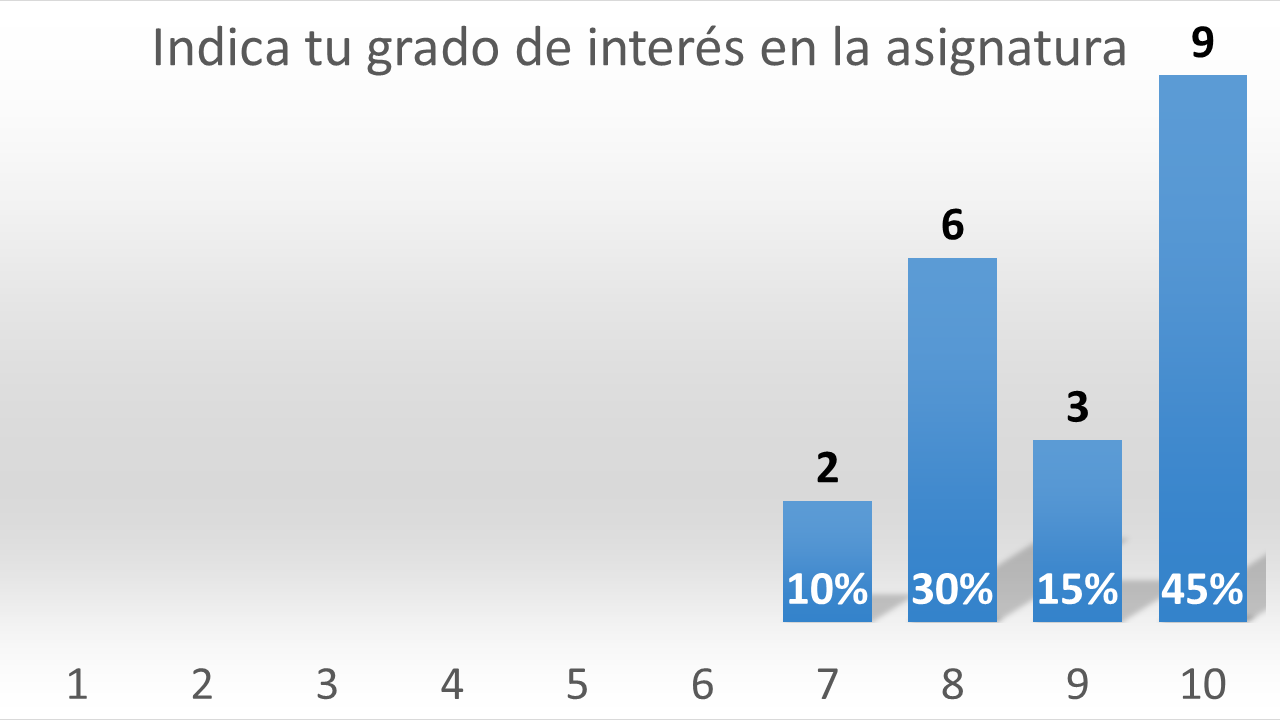
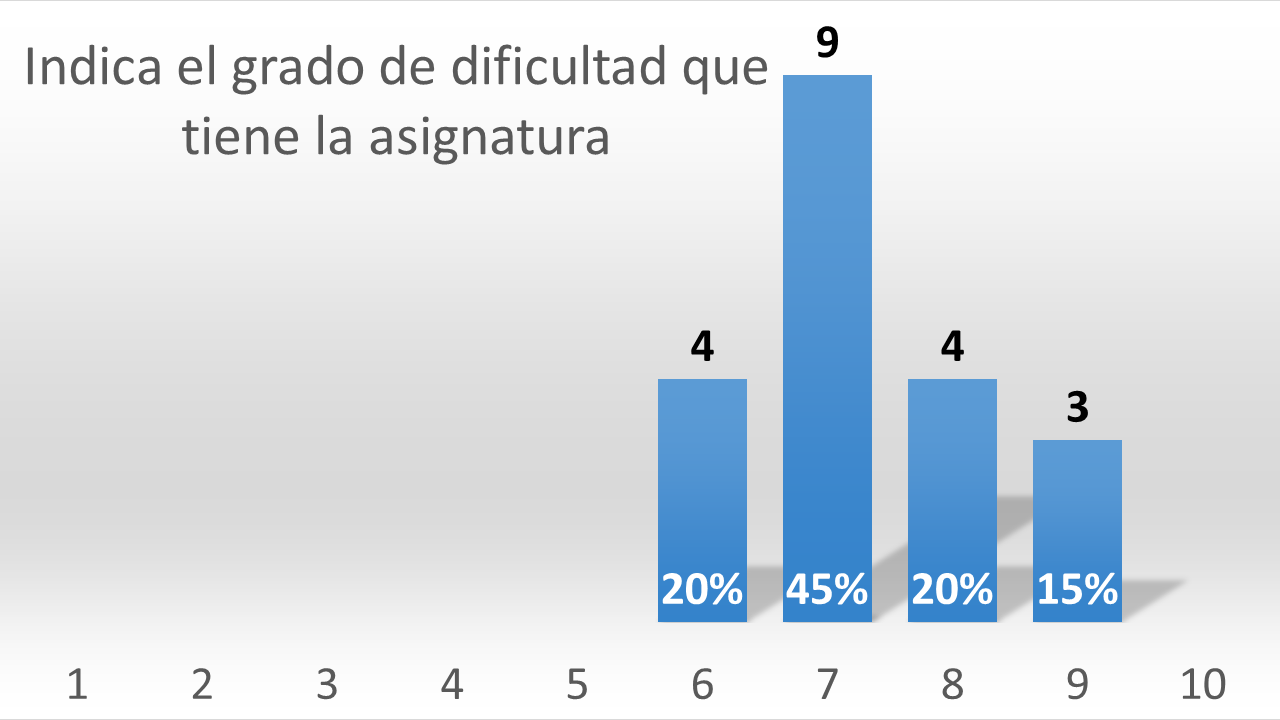
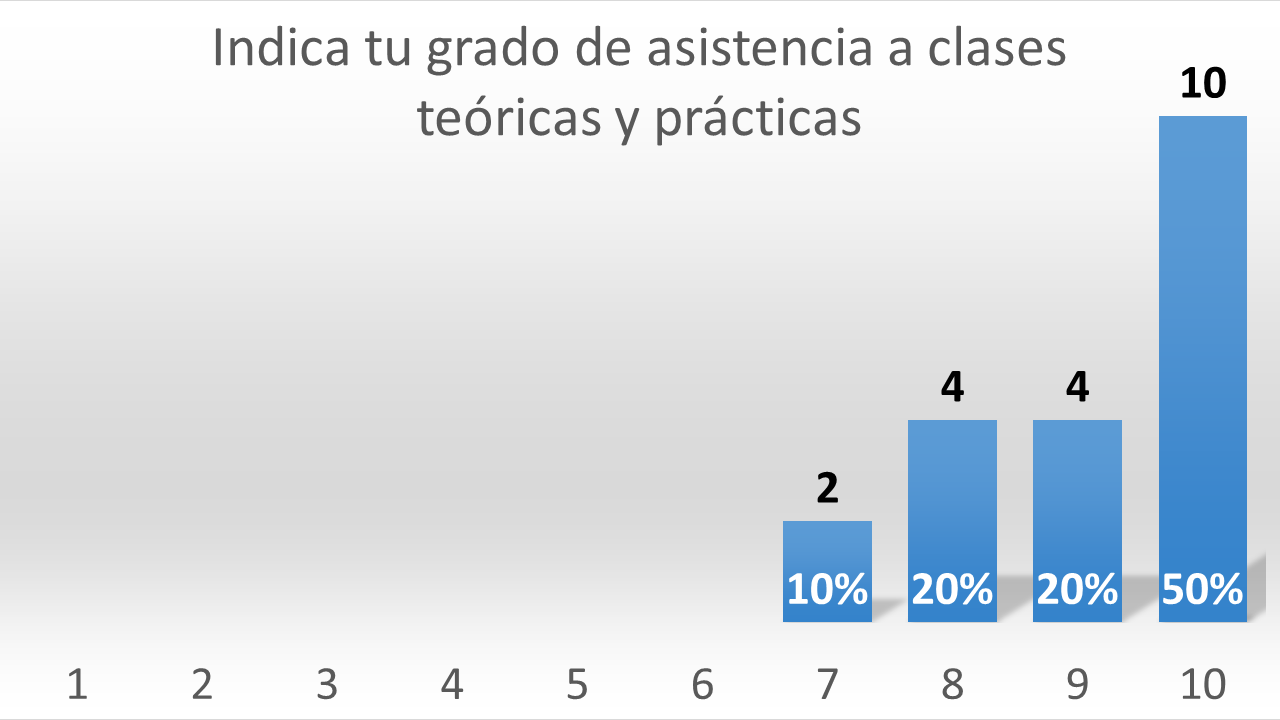
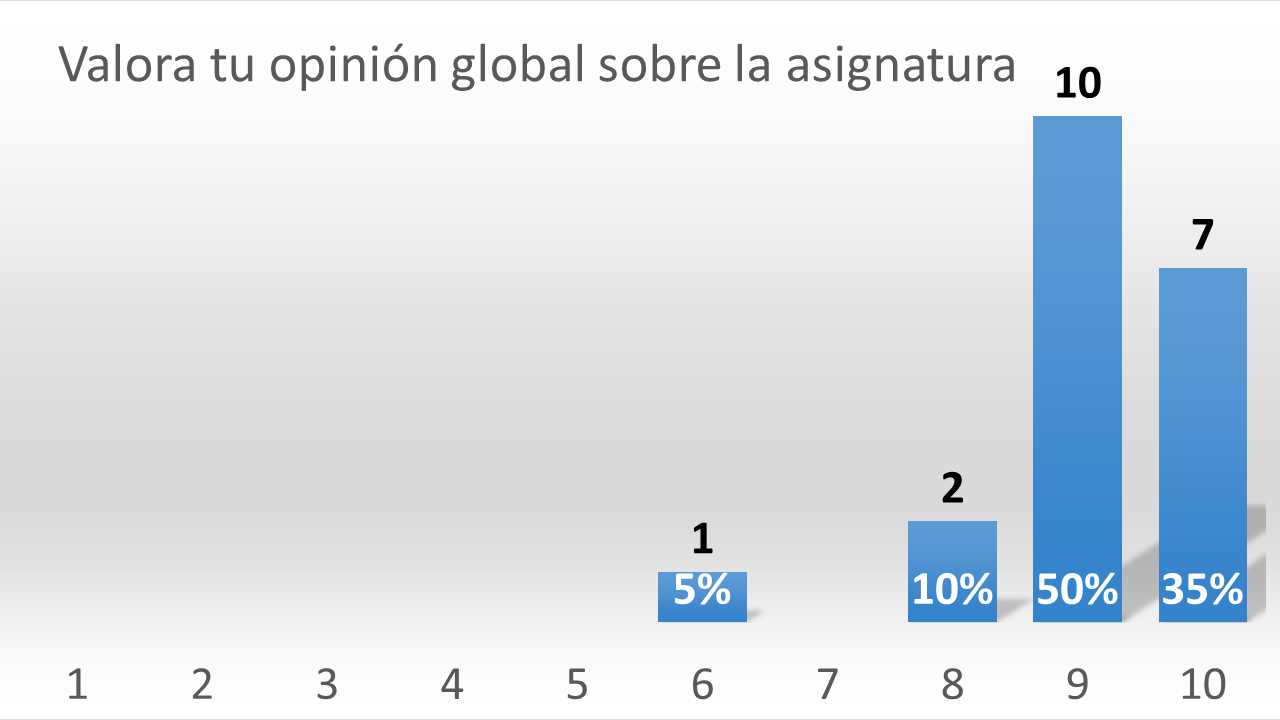
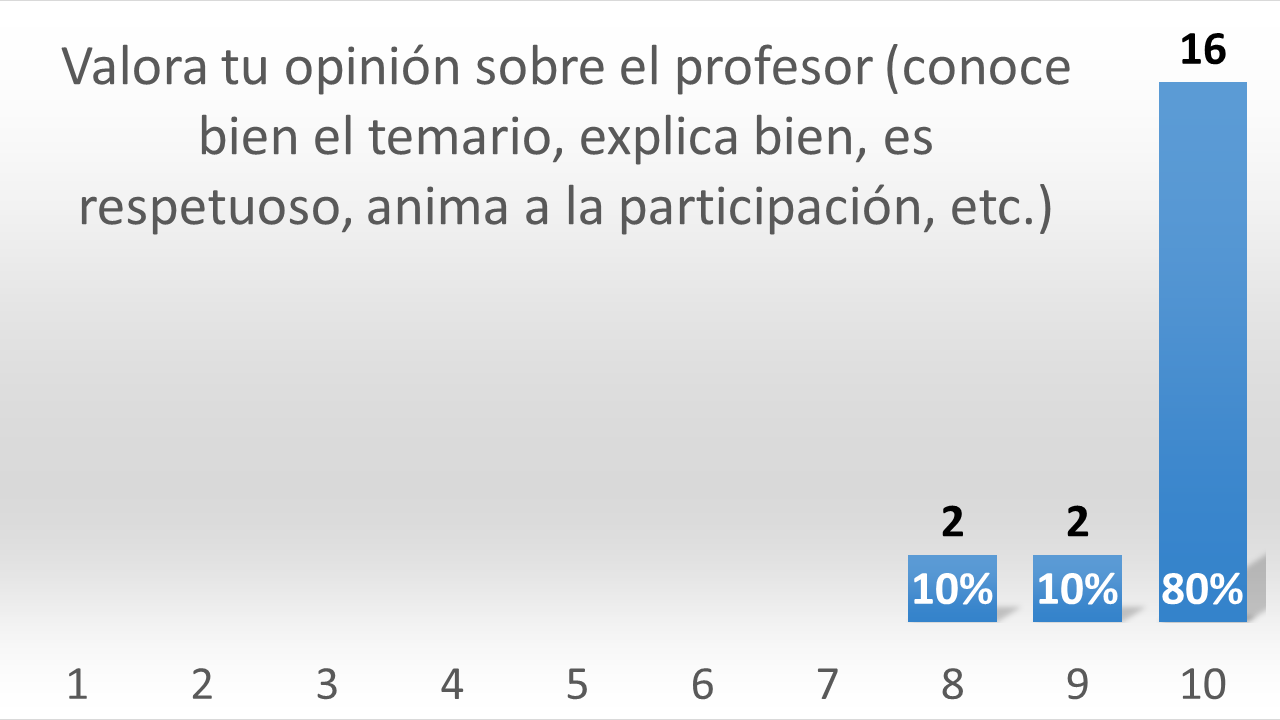
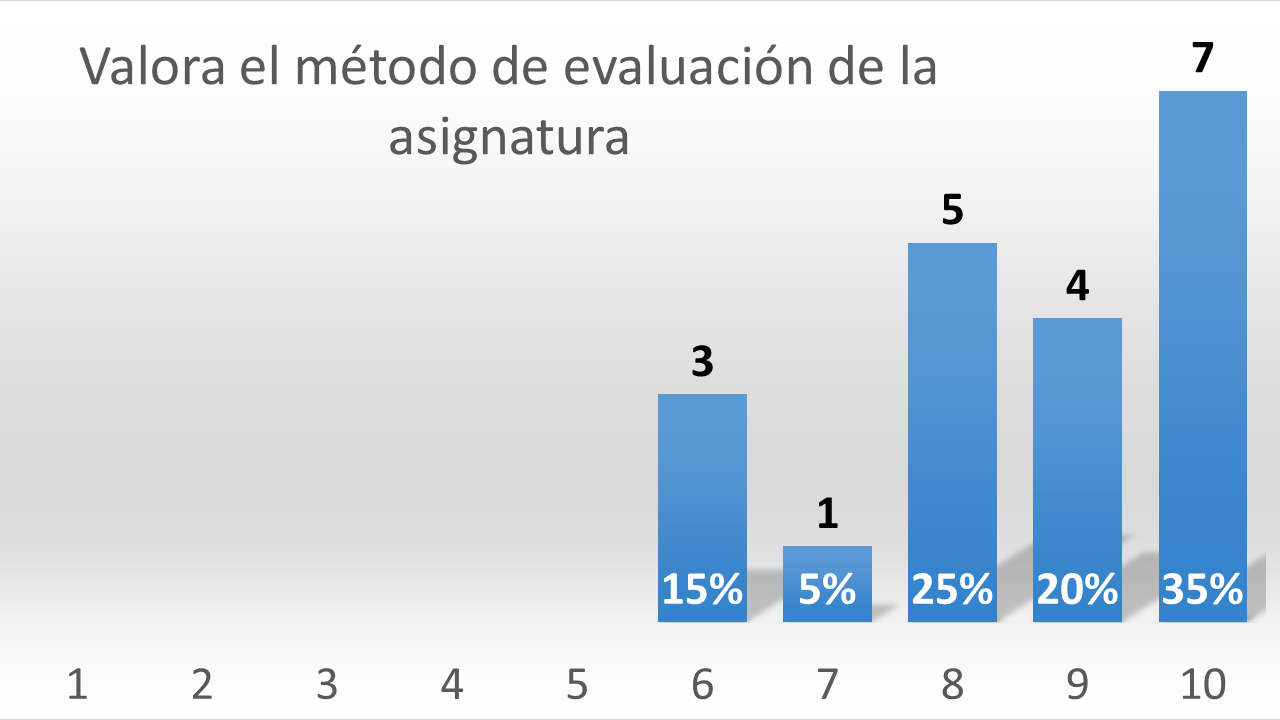
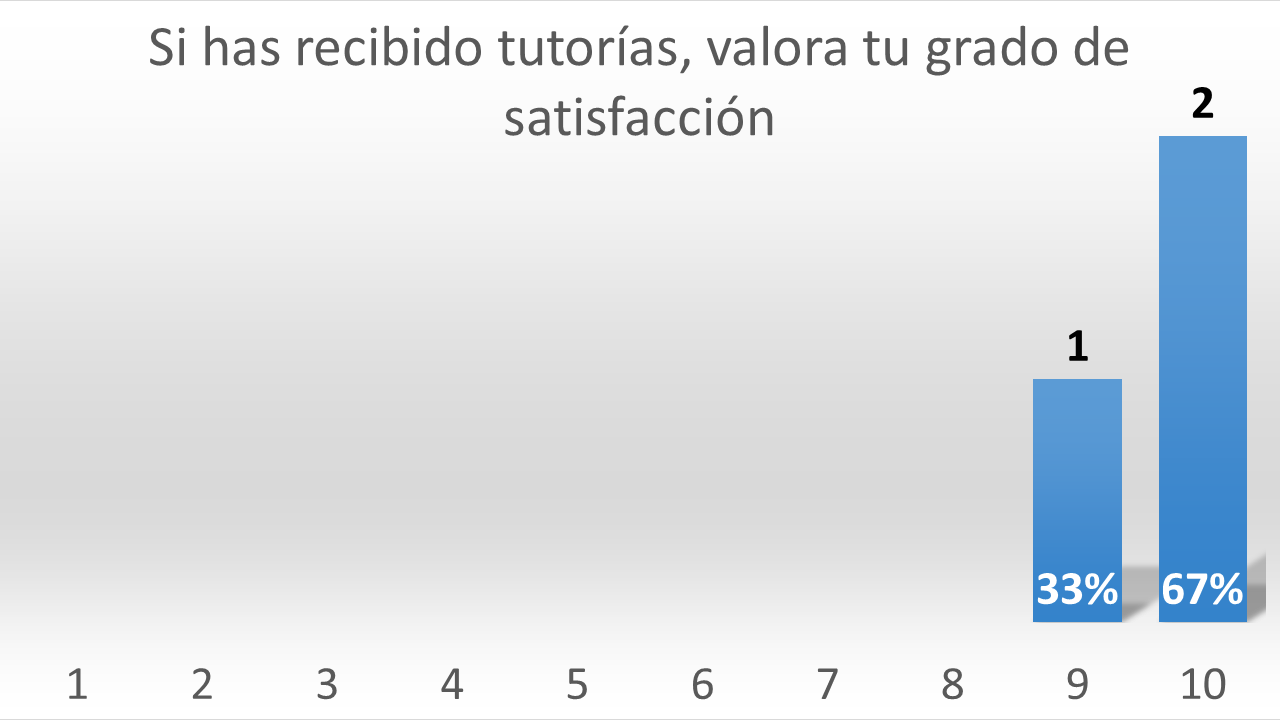
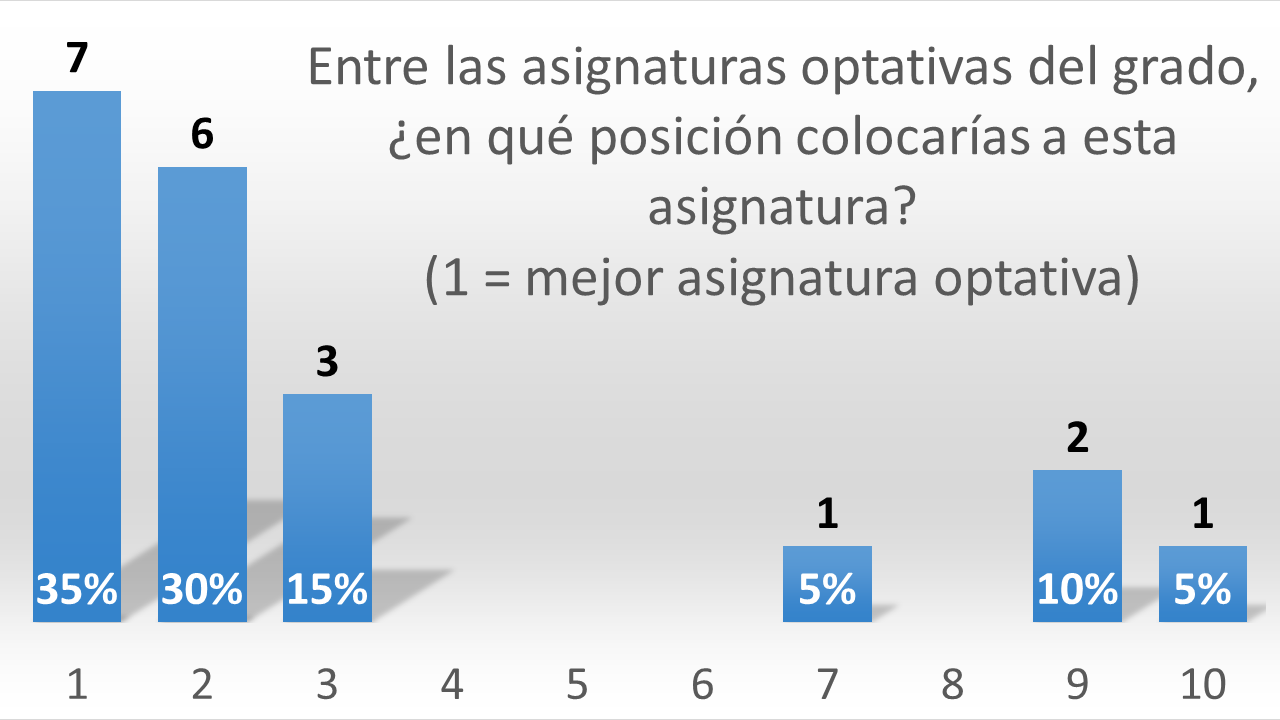
Resultados de la encuesta 2018-2019
Resultados:- Respondieron 20 estudiantes (sobre 21 matriculados) de forma anónima
- El 85% valora la asignatura con 9 o 10 puntos
- El 80% valora al profesor con 10 puntos
- El 80% valora el método de evaluación con 8 o más puntos
- El 80% considera que la asignatura está entre las 3 mejores optativas del grado
- Además de que el temario me ha parecido muy interesante, la forma de dar clase del profesor ayuda mucho. Los ejercicios de evaluación continua contribuyen al estudio diario (los relacionados con ejercicios de la asignatura) y permiten ahondar en temas relevantes que de otra forma se tocarían solo muy superficialmente.
- Cada uno de los temas ha llamado mi atención y eso ha significado un mayor interés en la asignatura. La idea de grabar las clases teóricas es genial, ayuda a revisar en cualquier momento el temario y repasarlo cuantas veces se desee. Muy buena idea que se debería extender al resto de asignaturas. La claridad en la explicación y la cercanía con el alumno también han sido un puto positivo en esta optativa.
- Iniciar conocimientos en robótica puesto que, aunque parezca mentira, no lo habíamos hecho previamente en la carrera. También las clases videograbadas para poder revisarlas en momentos de mayor lucidez y menor cansancio.
- La asignatura es interesante por sí misma y además el trabajo del profesor, tanto en clase como el trabajo posterior haciendo los vídeos, son excepcionales, lo cual sube aún más el nivel de la asignatura.
- La forma de exponer del profesor, su implicación e interés por el alumno, el temario en general y el uso de aplicaciones como Kahoot para refuerzo
- Las prácticas y los ejercicios de evaluación continua.
- Lo primero que más me ha gustado ha sido el hecho de poder estudiar al fin una asignatura relacionada totalmente con la robótica en TODA la carrera (además de la otra que hay de Sistemas Robóticos Industriales y lo que hemos visto de control), que es lo que más me gusta. Además es una asignatura que compagina MUY bien teoría con prácticas (reconozco que entender el funcionamiento de un controlador difuso, resultó complicado en teoría, pero con las prácticas y los ejercicios se terminó de entender). Además ha sido un profesor FANTÁSTICO, que ha sabido transmitir su entusiasmo (por lo menos en lo que a mi respecta) y ha facilitado de la mejor manera posible entender su asignatura (incluso ha hecho vídeos de las clases!! Todos los profesores deberían tratar de imitarle y grabar también las clases para así poder repasar conceptos que de primeras no se entendían muy bien). He podido aprender un montón de maneras de diseñar sistemas de control, conocido muchas vías y alternativas que aplicar en el sector de la robótica y el tema de drones... aunque me hubiese gustado entrar en más detalle en algunas de ellas (lamentablemente son 6 créditos de asignatura, ojalá hubiesen más asignaturas relacionadas para profundizar más en cada concepto). En general yo le pongo un 10, estoy muy satisfecho con la asignatura y por supuesto con usted como profesor.
- Lo que más me ha gustado ha sido la parte de las prácticas, hay que dedicarle mucho tiempo pero cuando salen, el grado de satisfacción es enorme.
- Lo que más me han gustado son las prácticas, ya que se puede ver perfectamente lo que hemos dado en teoría y algo que es un poco abstracto toma forma.
- Los temas a tratar.
- Los temas me parecieron muy interesantes y muy actuales, realmente muy útiles para nuestra formación.
- Me ha gustado el método innovador de grabar las clases, tengo un proceso lento de comprensión y con los vídeos podía pausar y repetir algo y verlo cuantas veces quisiera, al final me he dado cuenta de que mi falta de atención se debe a que rápidamente me pierdo y no sé seguir y los vídeos me han sido muy útiles.
- Me ha gustado mucho la forma de estructurarla, sobre todo los ejercicios que se mandaban ayudaban a comprender las cosas que habíamos dado en clase. Y las pruebas que hacíamos en clase también están muy bien. Se nota que el profesor se preocupa por los alumnos y eso motiva (Y la cercanía que muestra con nosotros). Respecto a lo de grabar las clases, viendo los videos me di cuenta de muchas cosas que en clase por despiste no me enteré bien, así que me parece una muy buena idea como forma de un suplemento para la gente que un día no pueda ir o para repasar.
- Prácticas.
- Sin lugar a dudas el profesor. Aprovecho que la encuesta es anónima para agradecerle muchísimo su grado de preocupación por los alumnos. Es capaz de trasmitirnos su pasión e introducirnos en una nueva rama del conocimiento donde desarrollarnos profesionalmente. Una de las asignaturas mejor impartidas del grado, por no decir que la mejor.
- Tener una visión global de otras formas de control.
- A veces exigía mucho trabajo.
- La evaluación por examen final.
- La práctica 2 conlleva mucho trabajo y pese a eso, llega a ser desesperante no conseguir el objetivo que se desea.
- La práctica 3, por mi falta de conocimiento en programación.
- Me cogí la asignatura porque me gustaba bastante su temario y la verdad es que no me ha decepcionado, por lo que no ha habido nada que no me haya gustado.
- Me hubiera gustado tener más horas de práctica, siento que a pesar de que eran temas muy interesantes, nos faltó práctica tiempo de práctica para profundizar y cristalizar los conceptos.
- Quizá el problema que veo es que las prácticas requieren mucho tiempo, sobre todo mucho tiempo de trabajo fuera de clase, como para además tener un examen que suponga el 45% de la nota.
- Quizás la práctica 2 se hizo demasiado larga. Intentaría acortarla de algún modo, aún así tampoco está mal.
- Reitero lo dicho, son solo 6 créditos, no da lugar a verlo todo en profundidad y es una lástima (al menos nos brinda multitud de bibliografía para que profundicemos en los aspectos que más nos interesen, y eso se agradece).
- Tal vez la práctica 2 requiera de demasiado tiempo de trabajo en casa. Aún así, fue entretenida y nos permitió entender mejor el diseño de controladores difusos.
- Temario muy extenso para una sola asignatura.
- Aunque hemos hecho ejercicios en clase creo que es necesario hacer más, y también aumentaría el número de pruebas con la aplicación Kahoot que anima bastante y ayuda a organizar ideas.
- Ha sido la asignaturas más didáctica y estructurada que he cursado, así que no se me ocurre que añadir. Por añadir algo, pienso que las sesiones de prácticas deberían ser más eficaces en cuanto a la realización de la práctica, ya que en la mayoría de los casos que conozco, el grueso de la práctica se ha hecho fuera del horario lectivo. Por último, quería agradecerle que se tome la asignatura en serio y la organice así de bien.
- Hacer más ejercicios del tema 3.
- Hubiera sido interesante ver a algún robot real trabajar (mas o menos complejo, dependiendo de las capacidades).
- Intentar quitar carga a la práctica del Pioneer e introducir algo en prácticas relacionado con redes neuronales y/o algoritmos genéticos. Quizás combinar está práctica con algoritmo genético o redes neuronales.
- Interactuar con laboratorios de robótica.
- Me habría gustado realizar alguna práctica o algún seminario de planificación de tareas.
- Me quedé con ganas de ampliar el último tema sobre planificación en robótica autónoma, y propondría un cambio de la práctica 3 por alguna de este sector... pero salvo esto, que es una opinión personal, quedo muy contento con mi paso por la misma.
- Sugiero que se graben todas las clases, entiendo que es un trabajo y esfuerzo extra para usted pero conociéndolo supongo que eso no le importa ya que hace todo lo posible para que nos enteremos de todo y nos ayuda.
- Una posible sugerencia, es hacer que en las clases los alumnos pasen a hacer ejercicios al pizarrón, de manera que toda la clase vaya resolviendo y sacándose las dudas. Eso hace que nos desenvolvamos mejor frente a otras personas y también que perdamos el miedo a preguntas que pensamos son muy pavas. Otra sugerencia es por ahí revisar la forma de la realización de la práctica 3, porque yo al menos sentí que no apliqué muchos contenidos del tema teórico correspondiente, sino que fue más una modificación de un script de matlab(opinión personal).
- Ya que hay que trabajar tanto durante el semestre, que se evalúe con la asistencia, ejercicios y prácticas. No hace falta un examen final si el profesor tiene ya tantos datos de los alumnos.
- Yo creo que si se trae a alguna sesión un robot (aunque sea muy sencillito) real donde se pueda apreciar en directo el sistema de control difuso... sería muy motivador (si el robot va bien claro jaja). O quizás si tiene contactos trabajando en el sector de la robótica, drones... donde sepa que aplican este tipo de controladores... pues si un día puede organizar alguna charla con ellos y que nos cuenten sus experiencias, salidas profesionales y empresas del sector a las que mandar el CV... sería fantástico.