Supplementary material for the paper in Proc. 20th European Signal Processing Conference 2012. (EUSIPCO 2012)
Upsampling and Denoising of depth maps Via Joint-Segmentation
Miguel Tallón1, S.Derin Babacan2, Javier Mateos1, Rafael Molina1, Aggelos K. Katsaggelos3
1Departamento
de
Ciencias de la
Computación e I.A.,
Universidad de
Granada, Granada,
Spain
mtallon@decsai.ugr.es
2
Beckman Institute,
University of Illinois at
Urbana-Champaign, IL
USA
dbabacan@illinois.edu
3Electrical
Engineering
Computer Science
Department,
Northwestern
University, Evanston,
IL USA
aggk@eecs.northwestern.edu
Reference
M. Tallón, S.D. Babacan, J. Mateos, M.N. Do, R. Molina, and A.K. Katsaggelos, “Upsampling and Denoising of Depth Maps via Joint-Segmentation” in European Signal Processing Conference, 245-249, Bucharest (Romania), August 2012.
Abstract
The recent development of low-cost and fast time-of-flight cameras enabled measuring depth information at video frame rates. Although these cameras provide invaluable information for many 3D applications, their imaging capabilities are very limited both in terms of resolution and noise level. In this paper, we present a novel method for obtaining high resolution depth maps from pairs of low resolution depth maps and the corresponding high resolution color images. The proposed method exploits the correlation between the objects present in the color and depth map images via joint segmentation, which is then used to increase the resolution and remove noise. Regions with inconsistent color and depth information are detected and corrected with our algorithm for increased robustness. Experimental results in terms of image quality and running times demonstrate the high performance of the method.
Experiments
Used datasets can be downloaded from here
• tsukuba dataset
• venus dataset
• teddy dataset
• cones dataset
In all the experiments, the LR depth maps are simulated by
downsampling the ground truth depth map by a factor of 4 in each direction, using bicubic interpolation,
and adding Gaussian white noise to
obtain a signal-to-noise ratio (SNR) of 20 dB.
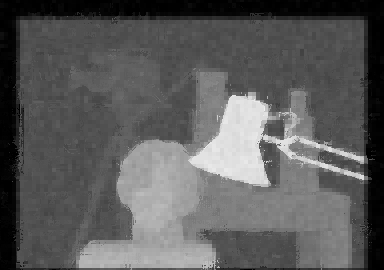
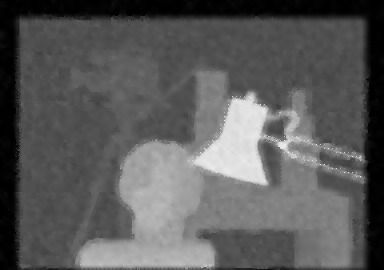
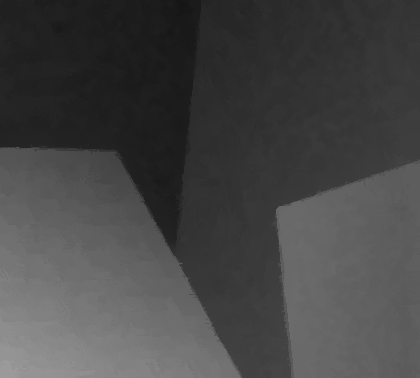
• Depth upsampling results for noisy tsukuba dataset.
 |
|
| LR depth map | |
 |
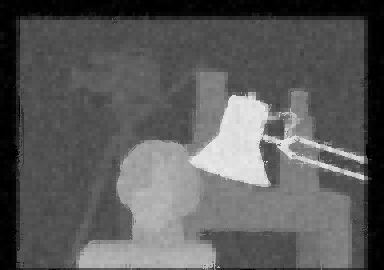 |
| JBU[8] | NAFDU [9] |
 |
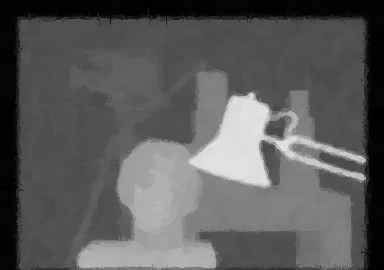 |
| MRF[10] | Proposed algorithm |
• Depth upsampling results for noisy venus dataset.
 |
|
| LR depth map | |
 |
 |
| JBU[8] | NAFDU [9] |
 |
 |
| MRF[10] | Proposed algorithm |
• Depth upsampling results for noisy teddy dataset.
 |
|
| LR depth map | |
 |
 |
| JBU[8] | NAFDU [9] |
 |
 |
| MRF[10] | Proposed algorithm |
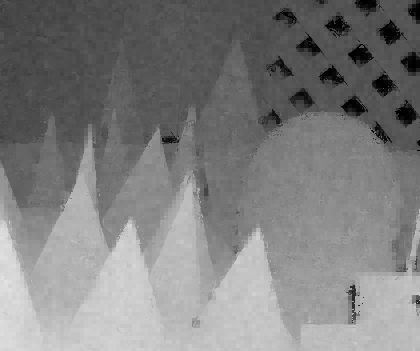
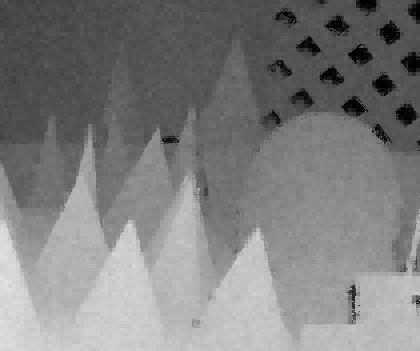
• Depth upsampling results for noisy cones dataset.
 |
|
| LR depth map | |
 |
 |
| JBU[8] | NAFDU [9] |
 |
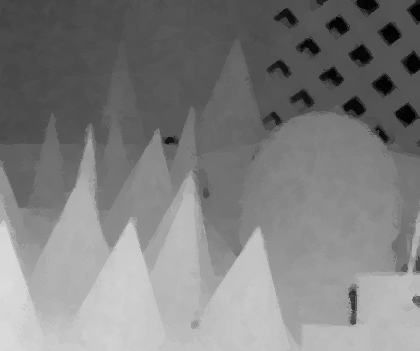 |
| MRF[10] | Proposed algorithm |
Numerical Results
Evaluation of the algorithms in noisy environment. CPU Time (s), Errors rate (percentage of bad pixels for depth upsampling evaluated in the mask which include all the pixels, the non-occluded regions and regions near depth discontinuities), Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity (SSIM) for the experiments.
|
|
||||||||||||||||
| Datasets | ||||||||||||||||
| Tsukuba | Venus | Teddy | Cones | |||||||||||||
|
|
||||||||||||||||
| Methods | Time | Errors | PSNR | SSIM | Time | Errors | PSNR | SSIM | Time | Errors | PSNR | SSIM | Time | Errors | PSNR | SSIM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| JBU [8] | 54.4 | 0.732 | 34.34 | 0.793 | 82.3 | 0.546 | 31 | 0.892 | 81.8 | 0.594 | 34.63 | 0.904 | 83.3 | 0.709 | 35.48 | 0.845 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| NAFDU [9] | 76.4 | 0.722 | 34.56 | 0.812 | 116 | 0.527 | 31.1 | 0.904 | 115 | 0.580 | 34.74 | 0.915 | 114.5 | 0.692 | 35.91 | 0.874 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MRF [10] | 32.4 | 0.715 | 33.82 | 0.826 | 16.7 | 0.559 | 30.7 | 0.897 | 40.4 | 0.566 | 34.09 | 0.913 | 40.7 | 0.681 | 35.26 | 0.885 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Proposed method | 33.3 | 0.634 | 34.62 | 0.887 | 41.1 | 0.350 | 40 | 0.977 | 38.4 | 0.423 | 35.56 | 0.954 | 38.1 | 0.542 | 36.94 | 0.940 |
References
[8] J. Kopf, M. F.
Cohen, D.
Lischinski, and M. Uyttendaele, “Joint bilateral upsampling,” ACM
Trans. on Graphics, vol. 26, pp. 96, 2007.
[9] D. Chan, H.
Buisman, C. Theobalt, and S. Thrun, “A noise-aware filter for real-time
depth upsampling,” in ECCV Workshop on Multicamera and Multimodal Sensor Fusion Algorithms and Applications, 2008, pp. 1–12.
[10]
J. Diebel and S. Thrun, “An application of markov random fields to
range sensing,” in Conf. on Neural Information Proc. Systems (NIPS),
2005, pp. 291–298.
Copyright © Miguel Tallón, S.Derin Babacan, Javier Mateos, Rafael Molina, Aggelos K. Katsaggelos, 2012